HTV(H-II Transfer Vehicle :H-II 系列火箭運送發射的太空船)是一10公尺長,最大直徑4.4公尺的無人軌道運輸太空船,它重達16.5噸可以攜帶6噸酬載;HTV有兩種型式的運籌:加壓艙與非加壓艙。加壓艙始終維持在一大氣壓與攝氏20度C,在HTV與ISS結合時,太空人可以不穿太空衣直接進去裡面工作;非加壓艙可以容納希望號與ISS的曝露設備酬載。

除了HTV,俄羅斯進步號與歐洲ATV也都有運輸物資到ISS上,但是HTV是唯一一個可同時執行運輸在ISS內部加壓空間裡使用的大型實驗設備酬載與運送ISS艙外實驗裝置與機器組件的太空船。JAXA的HTV與ESA的ATV在太空梭退役後,都是數一數二的大型太空船,比起俄羅斯聯盟/進步號系列重了2到3倍。 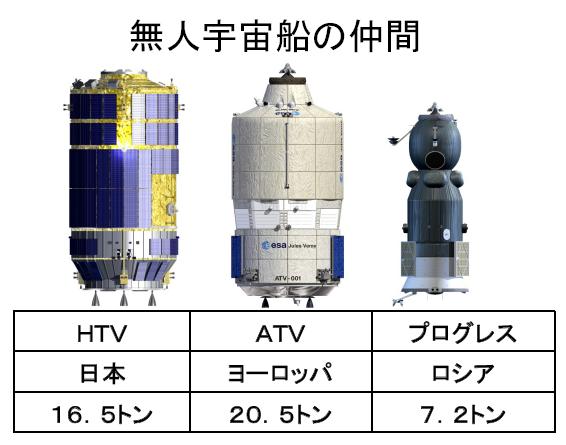

當今的歐洲與中國都使用俄國會合對接技術,歐洲使用俄國新型的"混血對接系統(Hybrid docking system)",中國採用俄國前一世代的"異體同構周邊結合系統APAS-89";HTV則是採用日本ETS7演進而來的會合對接技術。這使得HTV可以以較大口徑的"共同結合機構(Common Berthing Mechanism;CBM)"來對接,以及具有非加壓艙運送艙外設備機器能力。歐洲ATV優勢則是具有幫助ISS軌道修正與補給ISS的推進劑的能力,HTV則無此能力(沒對接在太空站尾部)。
HTV太空船的後部是容納航行電子的電氣艙與使太空船跟ISS會合的推進艙,被H2B火箭送入51度傾角的低地進軌道後,HTV經過三次軌道變動進入國際太空站23公里範圍內的"近傍通訊領域(proximity communication zone )",先跟希望號太空實驗室上的"近傍通訊系統(proximity communication system )"建立通訊連結,接著HTV透過"相對GPS航行(relative GPS navigation )"導引飛行,沿著V-BAR抵達國際太空站後方5公里處的AI 點(Approach Initiation point )再以"拋物線飛行軌道抵達國際太空站下方500公尺處的RI 點(Rendezvous Insertion point ),之後HTV轉換成"會合雷射雷達(Rendezvous laser radar)"導引,藉由電氣艙上的"會合雷射雷達(Rendezvous laser radar )"發出雷射至希望號下方的反射器(Rendezvous laser radar reflector )引導太空船沿著R-BAR以每分鐘1~10公尺速度接近國際太空站,當飛抵國際太空站下方250公尺的hold point時,HTV會進行180度轉向以避免潛在的緊急狀況發生,並維持大約35分鐘的"位置保持"讓地面控制人員分析太空船的狀況後,才讓HTV飛抵預先決定的"Berthing Box /Capture Box "區域,也就是在接合處下方9公尺的位置,然後HTV太空船關閉所有主引擎與姿態調整引擎保持"自由飄移狀態(free drift )"讓加拿大機械臂捉住再與ISS結合 。 

1994年H2火箭發射成功,日本成為美國與蘇聯之後第三個開發大推力液態氫氧引擎用於運載火箭第一級的國家,當今世界三大採用液態氫氧燃料的運載火箭分別是美國Delta-4、歐洲的亞利安5與日本的H2B。H2B的直徑是5.2公尺大於美國的Delta-4的直徑5公尺小於歐洲亞利安5號的直徑5.4公尺,但是就火箭長度 則是短於Delta-4 長於亞利安5號。


HTV採用"會合演算法"來模擬太空船接近ISS軌道,該演算法是在1998年的Test Satellite-VII (ETSVII)所發展的,而最終也證明在這方法下,HTV可以準確飛行。 
近傍通訊系統 ( Proximity Communication System / PROX ):
三菱電機所開發、安裝於希望號太空實驗室,由"PROX天線"、"PROX-GPS天線"、"PROX溝通設備( PROX communication equipment )"與"硬體指令面板( Hardware Command Panel / HCP )" 構成;當太空船在V-BAR與拋物線軌道飛至太空站下方時的導引稱為"相對GPS航行( Relative GPS navigation )"。
會合雷射雷達與反射器(Rendezvous laser radar & reflector ):
發出雷射光的傳感器安裝在太空船上,接收會合雷射的反射器則安裝於希望號加壓模組的下方,當太空船從R-BAR接近太空站時使用,此階段的導引又稱為"會合雷射航行( Rendezvous Sensor navigation )"。
http://archive.ists.or.jp/upload_pdf/2008-d-31.pdf
http://archive.ists.or.jp/upload_pdf/2008-f-11.pdf
http://archive.ists.or.jp/upload_pdf/2008-f-12.pdf
http://archive.ists.or.jp/upload_pdf/2008-g-16.pdf
http://archive.ists.or.jp/upload_pdf/2008-g-17.pdf
http://archive.ists.or.jp/upload_pdf/2008-k-64.pdf
http://www.jaxa.jp/pr/jaxas/pdf/jaxas027.pdf
http://www.jaxa.jp/pr/jaxas/pdf/jaxas029print.pdf
http://archive.ists.or.jp/upload_pdf/2009-o-2-07v.pdf
http://www.nasa.gov/pdf/384523main_htv_press_kit.pdf
http://iss.jaxa.jp/en/htv/mission/htv-2/library/presskit/htv2_presskit_en.pdf
文章標籤
全站熱搜

 留言列表
留言列表

